高画質防犯カメラシステム 車両管理システム AI処理 エッジコンピューティング 顔面分析 顔面認識開発 受託開発
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
<フォーマット比較表>
<カスタマイズ事例> ご希望に応じた豊富なカスタマイズ開発が可能です。 ・カメラ仕様 ・ビデオレコーダー仕様
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||





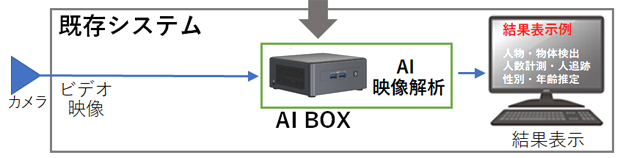
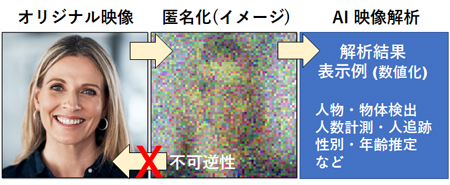 AI 解析を行なうため、個人情報保護法を侵害せずに既設の防犯カメラを活かして安心・安全に最小限の作業とコストでシステムの拡張が可能となります。
AI 解析を行なうため、個人情報保護法を侵害せずに既設の防犯カメラを活かして安心・安全に最小限の作業とコストでシステムの拡張が可能となります。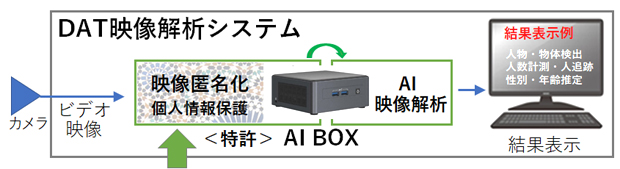
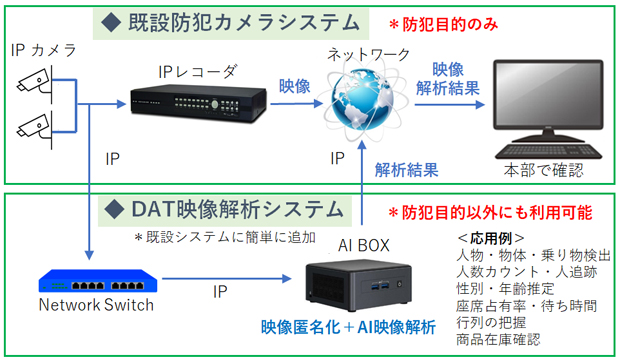
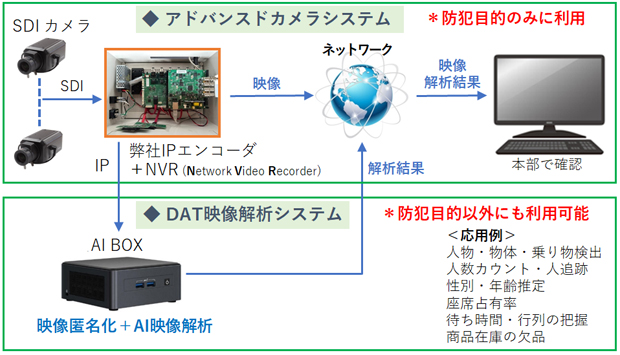
 ◆ 現代社会においては、事件・事故を追跡・検証する上で防犯カメラは必須のインフラとなりました。
◆ 現代社会においては、事件・事故を追跡・検証する上で防犯カメラは必須のインフラとなりました。
 - 形態とサイズ
- 形態とサイズ - チャンネル数 4ch /8ch /16ch
- チャンネル数 4ch /8ch /16ch ・システム仕様
・システム仕様


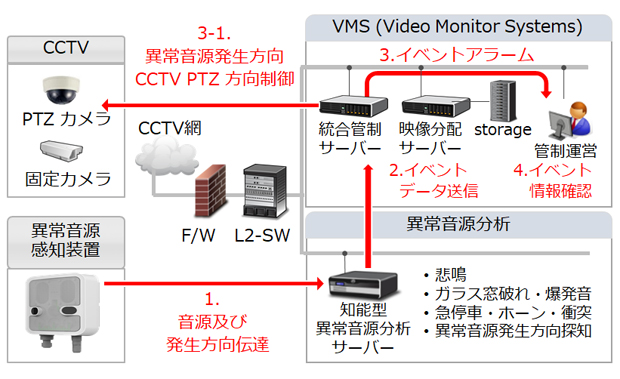

 ◆異音検知AIマイクとPTZカメラの組合せ
◆異音検知AIマイクとPTZカメラの組合せ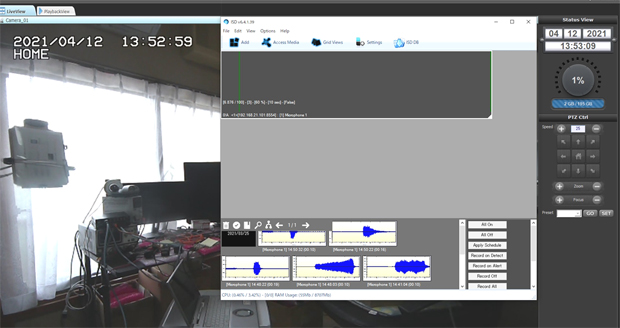

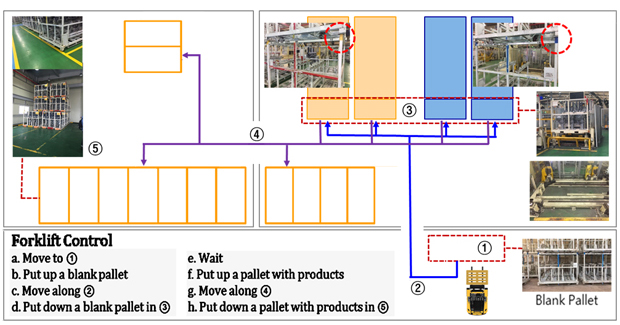

| ◆ 車両データ解析 燃費計算・走行距離・アラーム頻度等  |
◆危険運転度表示 -  |
◆運行軌跡 |
◆ビデオ再生 |
◆車両登録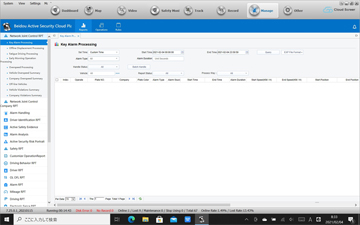 |
◆アラーム設定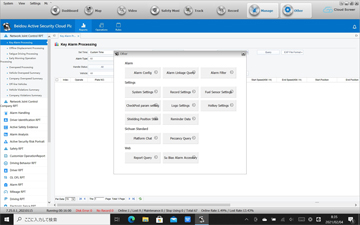 |
|
*商品化の際には日本語化と共に機能のカスタマイズにも対応いたします。 |
|
![]()
・・・法人のお客様・・・![]()
 DVRリモートビューシステム
DVRリモートビューシステム
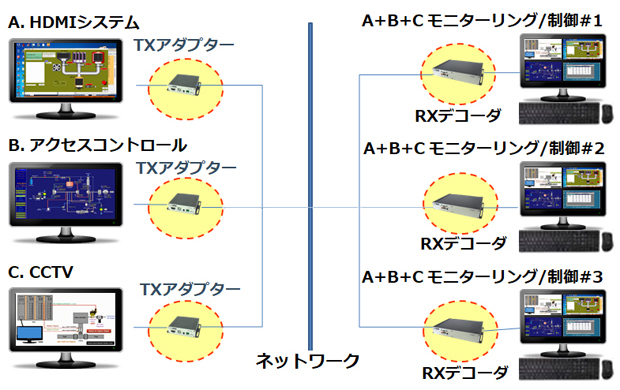
 社会的なニーズの拡大に伴って様々なセキュリティシステムが導入される中で、各々の設置場所、設置時期をはじめとして仕様やプロトコルが異なるために、規模が拡大するに従い一括管理できるシステム構築が求められてきました。
社会的なニーズの拡大に伴って様々なセキュリティシステムが導入される中で、各々の設置場所、設置時期をはじめとして仕様やプロトコルが異なるために、規模が拡大するに従い一括管理できるシステム構築が求められてきました。
⇒ 弊社がご提案するDVRリモートビューワーの導入により、既存のシステムをそのまま活かして、リアルタイムのモニターやDVRの制御の一括管理を遠隔にて実施できます。
<特徴>
- 独立した遠隔監視システム(汎用性)
:HDMIとUSBのI/Fを備えるNVR , DVRに対して独立したビデオ管理システムとして、遠隔にてビデオモニター、制御が可能になります。従って後付けでのシステム更新が可能です。PCのOSにも依存しません。 - 低遅延 (TXアダプター 〜 RXデコーダ間)
:独自の転送プロトコルにより、低遅延と最小限の帯域幅を実現します。
低遅延を実現する手段は、高速なデータコピー技術である「Zero Delay Memory Copy」で圧縮されたストリームを処理する方法の導入です。
送受信システムは、複数のクライアント接続時にもデータコピーの負担が増えないので、遅延特性にはほとんど影響しません。さらにデコード部分でも送信されたデータからフレームデータを高速に判断して、遅延を最小限にする独自のアルゴリズムを使用しています。 - マルチビデオ対応
:最大16台のHDMIビデオをリアルタイムで同時転送及びモニタリングが可能です。
また、最大64台のTXアダプターでフルHDの画質でリアルタイムで録画可能です。 - 高セキュリティ
: TXに接続されたDVR/NVR/PCは、ネットワークに直接接続されていない状態となります。 HDMI出力だけで、本TX / RXシステムを介してネットワークを構築する方法で、ターゲット装置(DVR , NVR , PC)はネットワークに接続されません。 故に外部からターゲット装置自体のアクセスが不可能で、より安全に保護されます。
*例えば、DVRに直接ネットワーク接続してリモート管制をしたり、PCにインストールされたTeam Viewerなどの場合、ネットワークを介してターゲット装置が直接ネットワークに接続されるためIPアドレスの情報、ID / パスワード情報などが危険にさらされる可能性がありますが、弊社のDRVを用いて遠隔システムを構築すれば、DRV自体の情報が漏洩することはあっても、ターゲット装置への不正アクセスはブロックされます。
*汎用IPカメラが利用するONVIF、RTSP、HTTPなどの標準的なプロトコルに基づいた伝送方式を使用するのではなく、低遅延の独自プロトコルにて送受信するため、送受信プロトコル自体が判明しない限り、ネットワーク上のデータ解析は困難となります。 - カスタマイズ
:HDMIのほかにVGA対応や、使用するネットワークに合わせたカスタマイズ、チューニングにより、最適なシステム構築が可能です。
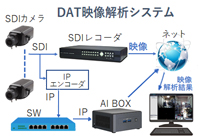
〇 現行のシステムにTXアダプターとRXデコーダーを追加!
〇 遠隔での画像モニターはHDMI接続、制御はUSBマウスを接続します。
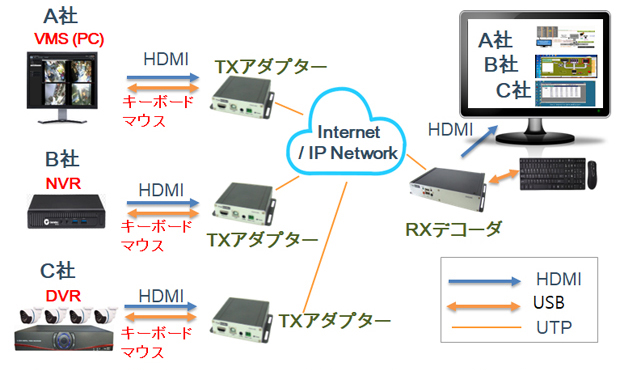
<システム構成例>

〇 遠隔監視・制御センターの構築が容易 (構成図)
<主な仕様 TXアダプター>
| 最大ストリーミングレート : | 最大60fps@1920×1080 / 3ストリーム |
| ビデオコーデック : | H.264 / H.265(オプション |
| ビデオ入力 : | HDMI×1系統(1080p60pのみ) |
| 音声入力/出力 : | スピーカー・マイク |
| アラーム出力 : | 1系統 |
| 周辺機器 : | USB×1 |
| イーサーネット : | 10/100/1000-base-T |
| 認証 : | KC,FCC,CE,RoHS |
| 動作温度範囲 : | 0℃〜50℃ |
| 動作湿度範囲 : | 10%〜80%(結露なきこと) |
| 電源 : | 12V/1A(最大12W) |
| 外形寸法 : | 107(W)×83(D)×26(H) mm |
| 重量 : | 165g |
<主な仕様 RXデコーダー>
| デコード台数 : | 16チャンネル(最大30fps@1080p |
| ビデオコーデック : | H.264 / H.265(オプション) |
| ディスプレイモード : | 分割画面モード(最大4×4),グループ画面モード |
| 再ストリーミング接続 : | 対応 |
| ビデオ出力 : | HDMI×1系統 |
| 音声入力/出力 : | スピーカー,マイク(初期値:入力設定) |
| 周辺機器 : | USB×2(マウス,キーボードなど) |
| イーサーネットポート : | 2ポート(WAN/LAN) 10/100/1000-base-T |
| 認証 : | KC,FCC,CE,RoHS |
| 動作温度範囲 : | 0℃〜50℃ |
| 動作湿度範囲 : | 10%〜80%(結露なきこと) |
| 電源 : | 12V/1A(最大12W) |
| 外形寸法 : | 195(W)×150.2(D)×38(H) mm |
| 重量 : | 725g |
![]()
・・・法人のお客様・・・![]()
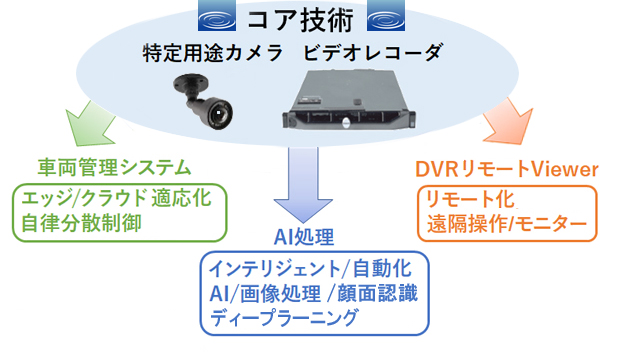
AI処理システム
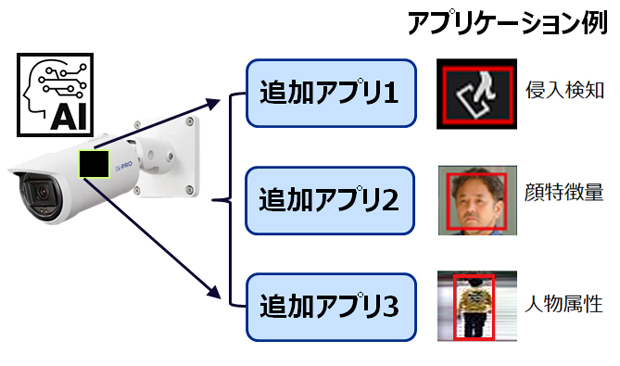
![]() ニュースペースデザインでは以下の3つのAI 技術に取り組んでいます。
ニュースペースデザインでは以下の3つのAI 技術に取り組んでいます。
〇 画像認識(Classification:何が写ってるかが判断可能)
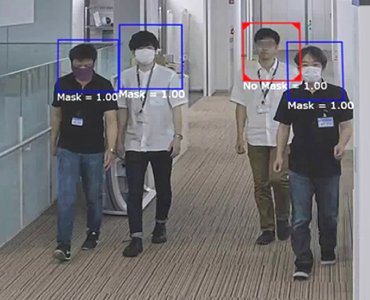
〇 物体検出(Object Detection:どこに何が写ってるかが判断可能)
〇 異常検知(正常データのみを学習し、異常なデータを検知する)
<開発実績>
◆ 人混み内の人物の動き(しゃがみ/振返り/走り出す等)を検出して、アラート発出
◆ 顔認識を用いた年齢、性別の判定による、サイネージ、マーケティング
◆ 指定エリアへの人 (物)の侵入、退出検出
◆ 異常事態 ( 炎 煙 喧嘩 等)の検出
◆ 遺失物(残留物)の検出
◆ 異常音の検出 (走行中の異常音:ひび・破損・断裂・叫び声・クラクション・爆発・衝突等)
<画像認識におけるAI処理の活用>
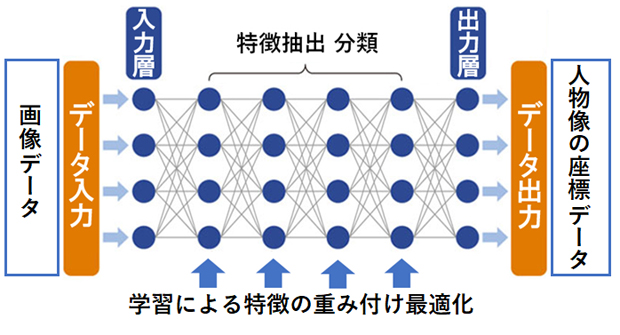
◆ AIが画像分析を行うための学習手法として CNN(畳み込みニューラルネットワーク)を用いて画像認識を行ないます。
◆ ライブラリーの利用を基本として、学習データにより重み付けをして最適化を図ります。
<画像処理AIの 汎用事例>
◆ 農業 :AI搭載ドローンで農薬散布を自動化
◆ インフラ :河川のコンクリート護岸のひび割れをAIで検知
◆ 医療 :AIを生かした画像診断で疾患を検知
◆ 空港 :顔認証技術で出国ゲートを効率化
◆ 警備 :AI搭載ロボットがドバイの街を警備
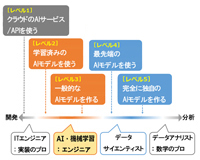
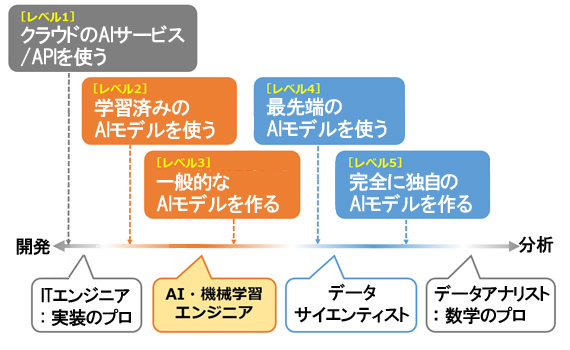
<今後のトレンド>
1) AIの進化のために機械学習やデータサイエンスの役割分担が進展します。
2) 自然言語処理が進展します。
プログラミング言語とは異なり、自然言語には言葉の曖昧性が存在します。
この言葉の曖昧性を踏まえて、自然言語を使って書かれた膨大なテキストデータを実用的に扱うために自然言語処理という技術が使われています。
チャットボットのアルゴリズムや翻訳、フェイクニュースの見破りに使われる事が多く、文章から意味のある情報を取得後、解析/解釈を行います。
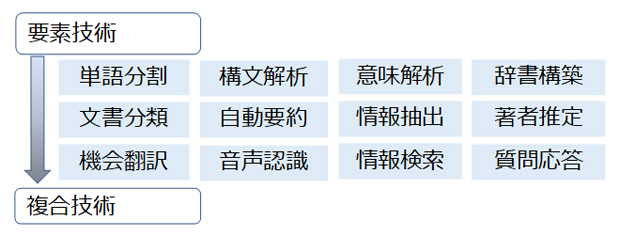
そのプロセスは、
⇒言語処理を行う前段階として、機械可読辞書とコーパスの構築
⇒形態素解析を行い、意味を持つ最小の言語単位に分割
⇒意味のある情報を取得
⇒構文解析/意味解釈/文脈解釈等![]()
・・・法人のお客様・・・![]()
顔面分析システム
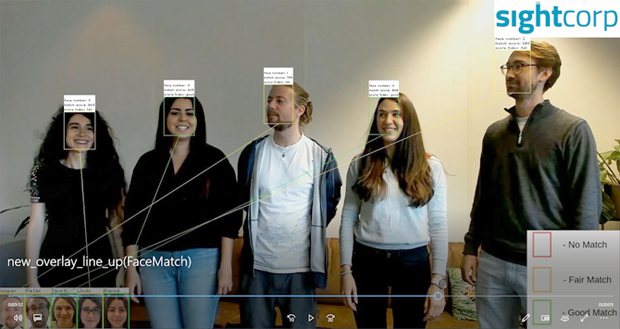
 オランダ・アムステルダム大学からのスピンオフ企業であるSightcorp社が提供する技術は、コンピュータービジョン・顔面分析と感情認識・人工知能技術などの分野における長年に亘る研究に基づくものです。
オランダ・アムステルダム大学からのスピンオフ企業であるSightcorp社が提供する技術は、コンピュータービジョン・顔面分析と感情認識・人工知能技術などの分野における長年に亘る研究に基づくものです。
サイトコープ社は、使いやすい柔軟なソフトウェア開発キット“DeepSight SDK とFaceMatch SDK”などの製品を開発・販売しています。
前者は主にデジタルサイネージ業界向け、後者はセキュリティ目的の顔面認識を対象とした製品です。
弊社は2015年に国内販売代理店となりました。また、アムステルダム大学との密接な共同作業により、先端的な研究と技術の創出に参加できる立場にいます。
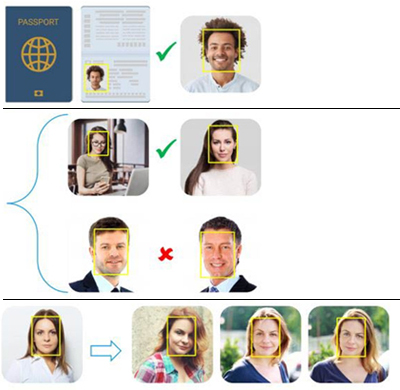
<特徴>
|
◆ IDの確認 |
 |
|
◆ 顔の比較 |
|
|
◆ 顔検索 |
![]() DeepSight
DeepSight
ディープラーニング技術を利用した年齢・性別のようなデモグラフィックの重要な情報を認識します。
同時に顔面の表情、目の位置、頭の方向、視聴時間、服の色など多くの機能をリアルタイムで計測することが出来ます。
ディープラーニングにより6種類の表情(幸福・怒り・悲しみ・・・)を数値で表すことが出来ます。
![]() FaceMatch
FaceMatch
ディープラーニング技術により正確な 1:1認証、1:n 認証を実現しています。
複数の人間の顔面を同時に認識出来ます。
![]() クロス-プラットフォーム
クロス-プラットフォーム
ビジネスの成長に貢献し市場でリードするため、正確かつ柔軟なソリューションを顧客に提供します。
デスクストップアプリからウェブサービスやモバイルアプリに至るまで幅広いOSで動作します。
![]() DeepSight SDK
DeepSight SDK
◆ 評価用データセット: WIDER FACE
WIDER FACEは、全ての顔面検出モデル用標準ベンチマークとして業界で認知されたデータセットです。
ポーズ、マスク着用など異なる変化を持つ顔面にも対応します。
|
◆ DeepSight SDKの検出精度 |
男性 |
女性 |
|
容易なレベルでの平均精度: |
94.8% |
91.7% |
|
中間レベルでの平均精度: |
90.8% |
- |
|
マスクをしていたり、横を向いているような |
81.1% |
- |
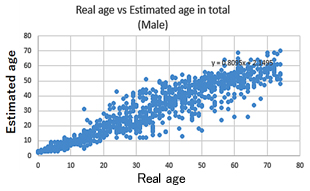
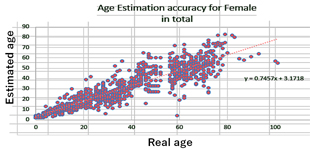
![]() DeepSight SDKによる年齢の推定
DeepSight SDKによる年齢の推定
18歳から100歳の人の顔をデータベースとして保有しています。
|
男性 |
女性 |
|
|
全体としての推定精度: |
±5.0歳 |
±6.08歳 |
|
18歳以下のグループ: |
±0.68歳 |
±0.23歳 |
|
18-35歳の範囲での精度: |
±3.00歳 |
±4.74歳 |
|
36-55歳の範囲での精度: |
±4.75歳 |
±5.4歳 |
|
56歳以上の範囲の精度: |
±11.60歳 |
±14.4歳 |
注: 18歳以下の年齢推定精度はこの年齢範囲全体を平準化したものであり、大幅に向上している結果が出ていますが、顔の特性により年齢判定は大きく異なっています。
 |
 |
|
実年齢と推定年齢の違い(男性) |
実年齢と推定年齢の違い(女性) |
![]() DeepSightの国内・海外導入事例
DeepSightの国内・海外導入事例
◆ デジタルサイネージシステムへの採用
⇒ オフラインでマーケティングデータの収集
⇒ 対象者の性別・年齢に基づくコンテンツのリアルタイム自動更新
◆ 自動車業界への導入
⇒ ドライバの監視(眼の開閉と頭部の姿勢)--安全運転の実現
⇒ 表情の認識により、車内の雰囲気と室内の調整(室温・カーラジオなどの音量調節)
⇒ タクシー利用客へのコンテンツ提供とビッグデータの収集
◆ 大学・予備校のリモート講義(表情の変化を測定し参加者の講義内容理解度を判定)
◆ 医療機関で Informed Consent 時における患者・家族の理解度の判定![]()
・・・法人のお客様・・・![]()
受託開発
![]() AI ソフトウェアの受託開発
AI ソフトウェアの受託開発
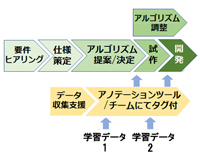
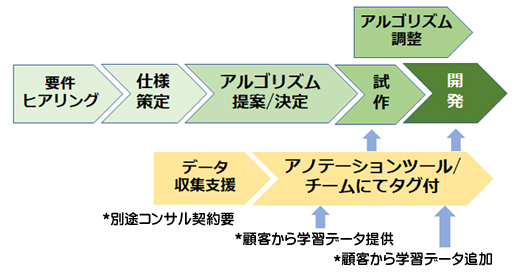
◆ 受託開発プロセス
お客様の上流設計(要求ヒアリング/仕様策定)から参画し、開発全般をサポートします。
アノテーションを外注することによる問題点を回避できます。
問題点とは:
*映像/画像データを外注先に開示するために、開発目的を推察される可能性がある。
*工数がかかるためコストが高い。
*常に均一な品質を求めるには、外注先の特定の個人を指名する必要がある。
*期待する品質になるまでに時間がかかる。
上記のような問題を解消するために、弊社ではアノテーションツールの開発、アノテーションチームの育成を進めています。
〇 熟練者と半自動化ツールの活用により効率的なアノテーション作業が行えます。
◆ AIに関する基礎知識講習会(1〜3日程度)をコンサルティング契約のもとで行います。
<概要>
・AIの概論(AIとは何か / AIの仕組み / AIで何ができるのか等)
・AIの活用事例
・最新の動向
*お客様からのヒアリングを元に説明する内容をカスタマイズ可能です。
![]()
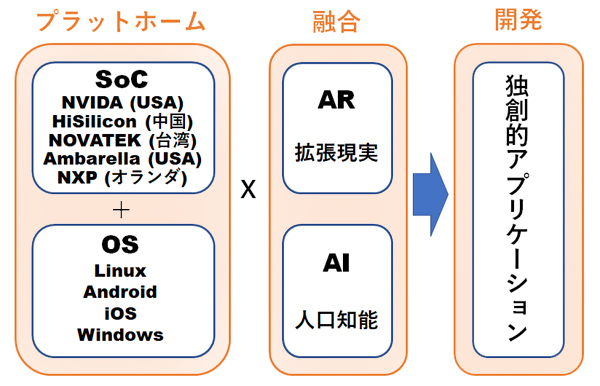
![]() 映像機器の受託開発
映像機器の受託開発
弊社で長年培ってきた映像・音声・GPS・無線関連機器の受託開発を行ないます。
例
・DVR (Digital Video Recorder )
・NVR (Network Video Recorder)、Drive Recorder
・カメラ ( IP , HD-SDI , EX-SDI , LVDS , ONVIF 等)
・フォーマット変換、中継器
・SOC: HI SILICON , TI 等
・OS: Linux , Android , iOS , Windows
・映像コーデック: H.264 , H.265
・音声コーデック
・GPS、Wi-Fi など
◆ 受託開発プロセス

![]()
・・・法人のお客様・・・![]()
Copyright 2010- New Space Design Co.,Ltd All Rights Reserved